SszgwDk
SszgwDkCMU15-445 Fall 2023 Project 2
bustub的哈希索引结构
bustub使用的哈希索引是可扩展哈希的一种变体,在两级方案的基础上添加了一个HeaderPage,按照文档的说法,这是为了使哈希表可以容纳更多值并有可能实现更好的多线程性能。
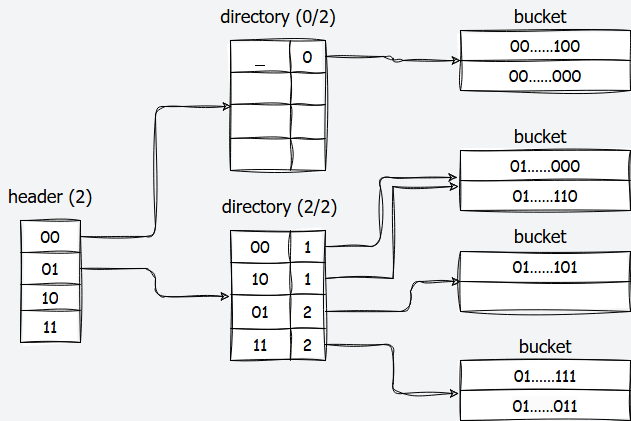
三种Page
如文档任务2所说,可扩展哈希表由三种Page组成:HeaderPage、DirectoryPage和BucketPage。
HeaderPage
一般只有一个HeaderPage,类似二级页表中的页目录表。
| |
HeaderPage维护成员包括一个DirectoryPage数组和最大深度max_depth_,记深度为x,数组的大小为2 ^ x,且使用哈希值的最高有效x位进行索引。如位深度为2,32位哈希值为0x5f129982,最高有效位前2位为01,则会被索引到01对应的DirectoryPage上。
DirectoryPage
| |
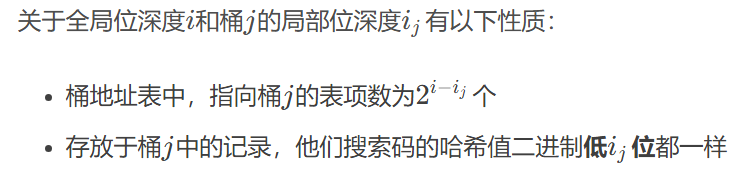
DirectoryPage的成员包含第三层的BucketPage的PageId数组,全局位深度global_depth和每一个Bucket的局部位深度local_depth数组,PageId数组的大小为2 ^ global_depth,且使用哈希值的最低有效global_depth位进行索引。如全局位深度为2,32位哈希值为0x51129982,最低有效位后两位为10,则会被索引到10对应的BucketPage上。
BucketPage
| |
对应一个哈希桶,成员包含一个Key-Value数组,以及数组大小size_。被索引到该Bucket的Key-Value会追加到该Bucket上进行存储。有一个max_size_限制,例如2。
对上面提到的三个depth的直观理解:
-
max_depth:header、directory各自的最大深度限制,header的max_depth还用于索引directory表项; -
global_depth:对应directory的当前深度,用于索引bucket表项(当前的max_size不代表有效条目数); -
local_depth:对应bucket的当前深度(==非常重要,在insert流程中具体讲解作用==)
一个限制:global_depth >= local_depth
查找流程
假设哈希值固定为32bit
- 获取
header_page,计算key的哈希值hash - 根据
hash >> (32u - max_depth_)(取哈希值最高的max_depth_位)得到directory_page_index,进而得到derectory_page - 根据
hash & (1u << global - 1)(取哈希值最低的global_depth位)得到buckect_page_index,进而得到bucket_page - 遍历
bucket_page中的所有条目,查找是否有目标key
动态扩展原理
最核心需要理解的是插入操作可能触发的directory扩容和桶拆分,以及删除操作可能触发的directory缩容和桶合并。
Insert大致流程
首先根据key的hash值,定位到目标桶
target,如果目标桶没满,直接追加。如果目标桶已经满了,这时候需要考虑
directory扩容和桶拆分,两种情况:
global_depth == local_depth[target],此时代表只有一个表项指向target(注意理解这里深度相同的含义),要做以下工作:
global_depth++,使得directory的容量翻倍,原来的每个表项都产生出自己的一个副本表项(称作split_image,若一个原始表项的位置是bucket_index,则它的split_image对应位置是bucket_index + (1 << (global_depth - 1))),新的表项包含和原始表项一样的指针,即指向相同的bucket。为什么只需要分裂一个桶,但是所有旧表项都要有一个副本呢?
因为global_depth++之后,由hash值获取目标桶的idx会增加一位,有可能就会指向副本的idx,此时副本表项指向相同的桶,就不会对结果造成影响。
系统分配一个
new_bucket,让目标桶的副本表项指向它。并且令**local_depth[target]**和**local_depth[new_bucket]**都等于**global_depth****,代表均只有一个表项指向它们。**将目标桶中的所有记录和要插入的新记录合起来,根据记录的key的hash值的后
global_depth位(现在已经增加了一位)重新散列到target_bucket和new_bucket。
global_depth > local_depth[target],此时directory中不止一个表项指向目标桶target,会有2^(global_depth - local_depth[target])个表项。此时不需要增加global_depth,直接分裂目标桶即可:系统分配一个
new_bucket关键注意:哪些表项修改为指向
**new_bucket****?因为此时不是两个了**以local_depth = 2,global_depth = 4为例,此时有
2^(4 - 2) = 4个表项指向target_bucket(假设已有一个确定的bucket_index,那么其他三个满足idx & 0x3 == bucket_index & 0x3的idx即为指向target_bucket的表项索引(最低两位相同))。我们想要拆分bucket,也就是让local_depth+1,在这个例子中这些idx最低两位相同,要实现拆分,要让idx的第3位发挥作用,所以拆分的逻辑便是:让第3位 = 0 的idx对应的表项指向原始
target_bucket,让倒数第3位 = 1 的idx对应的表项指向新拆分得到的new_bucket。那么这个“第3位”怎么得到?很容易推出就是
local_depth+1,这也是local_depth的含义之一,代表多少位发挥作用。进而可以用1U << local_depth检查idx的对应位是否为1,以此来进行桶的拆分。重新散列所有记录,
local_depth++
Remove大致流程
当Remove成功之后,目标桶变空,就需要合并桶,此时只需要改变所有指向空桶的指针,然后删除掉对应页,同时对其local_depth--即可。
注意,有可能合并之后桶还是空的,此时要持续合并直到不为空,不然不能通过测试。
最后还可能需要对directory缩容global_depth--(如果所有bucket的local_depth都比global_depth小)。
Task#1:Read Write Page Guards
Task1要求实现三种PageGuard类,分别是BasicPageGuard、ReadPageGuard和WritePageGuard。三种PageGuard类都使用RAII的思想保护Buffer Pool Manager的缓冲页,防止用户遗漏调用Unpin方法导致缓冲页被固定无法驱逐,与只能指针相似,当PageGuard对象生命周期结束时,在析构函数中调用Unpin方法来确保释放缓冲页;进一步的,ReadPageGuard和WritePageGuard还会保护缓存页的读写一致性,且避免死锁(若其他时候后忘记解锁,则在析构时解锁)。
三种类中主要实现的方法有:
- 三种
PageGuard的移动构造函数、移动赋值运算符、Drop方法与析构函数 -
BasicPageGuard类中的UpgradeRead()函数和UpgradeWrite()函数
关于移动构造函数、移动赋值运算符,要对右值引用相关概念有所了解
Drop函数为对外提供的释放页接口,它需要做的事情就是调用一下BufferPoolManager的UnpinPage函数,将page_中维护的页释放(如果有的话);在ReadPageGuard和WritePageGuard中,则还需要解锁(读锁或写锁)。
实现完这三种PageGuard类后,需要使用它们实现BufferPoolManager类中的FetchPageBasic、FetchPageRead、FetchPageWrite和NewPageGuarded函数。实现也比较简单,都是先调用FetchPage或NewPage,然后构造一个PageGuard,注意如果是ReadPageGuard要加读锁RLatch,如果是WritePageGuard要加写锁WLatch。
Task#2:Extendible Hash Table Pages
实现三种可扩展哈希中使用的数据结构,也就是三层结构中每一层的页面布局。如上文所说,分别是HeaderPage、DirectoryPage和BucketPage。
这三个类中需要我们实现的接口都非常简单,需要注意一些边界条件,例如max_depth的限制,local_depth <= global_depth的限制等。
另外一个需要注意的是DirectoryPage的IncrGlobalDepth(),不仅要对global_depth_++,如上文“Insert大致流程”中所说,还要为原有的表项创建副本,即拷贝bucket表项和local_depth。
Task#3:Extendible Hashing Implementation
实现Extendible Hashing的查询、插入和删除。难点在于“bucket splitting/merging and directory growing/shrinking”。
查询比较简单,按照header->directory->bucket的顺序来查找即可,注意使用Task1中实现的FetchPageRead和三种PageGuard的Drop(尽早释放,提高并发度)。
插入Insert
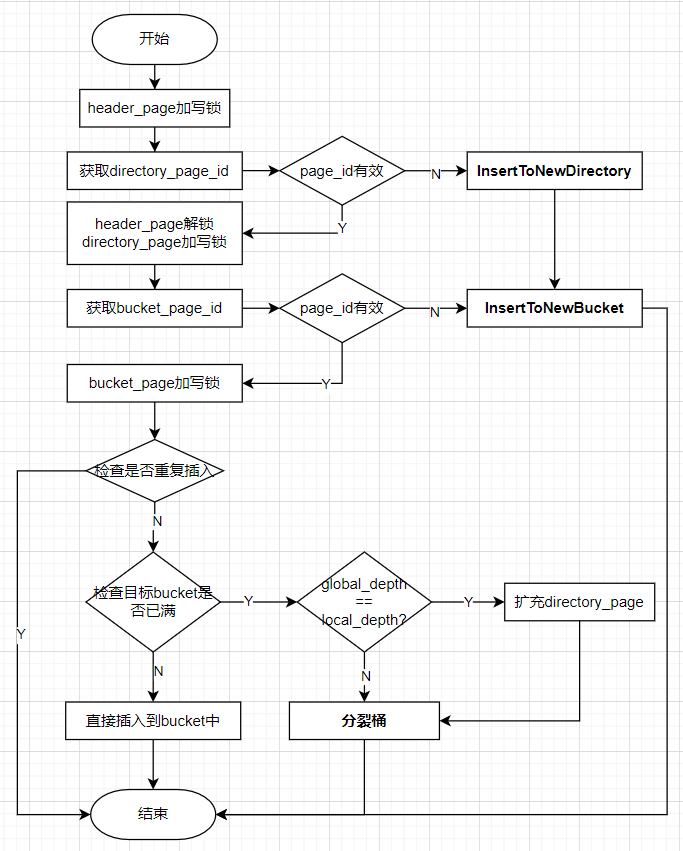
InsertToNewDirectory和InsertToNewBucket的实现步骤是相似的:
- 通过
NewPageGuarded新建数据页,并获取PageGuard - 通过
UpgradeWrite()提升为写锁 -
Init初始化页面 -
SetDirectoryPageId或SetBucketPageId:在headerPage或directoryPage设置表项 -
InsertToNewBucket或bucket_page->Insert(k, v, cmp_)
在上面的流程图中可以发现,除了HeaderPage,DirectoryPage和BucketPage都是直到最后才释放写锁的(可能有并发度更高的实现),这里可以体现出bustub的可扩展哈希表增加了一个HeaderPage的优势,这样在不同directoryPage上的插入操作可以并发进行,从而能有更好的多线程性能。
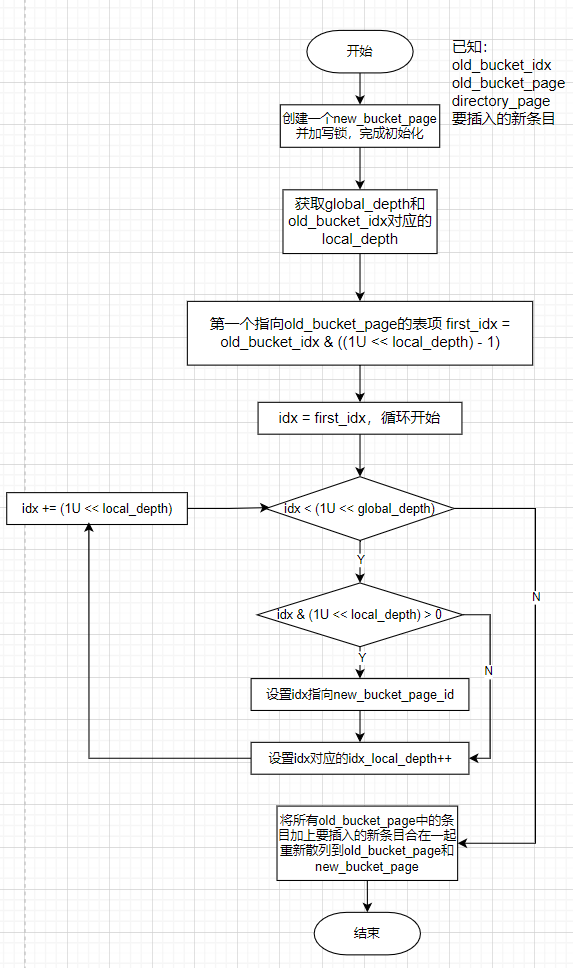
分裂桶的步骤根据上文“Insert大致流程”,实现逻辑如下:
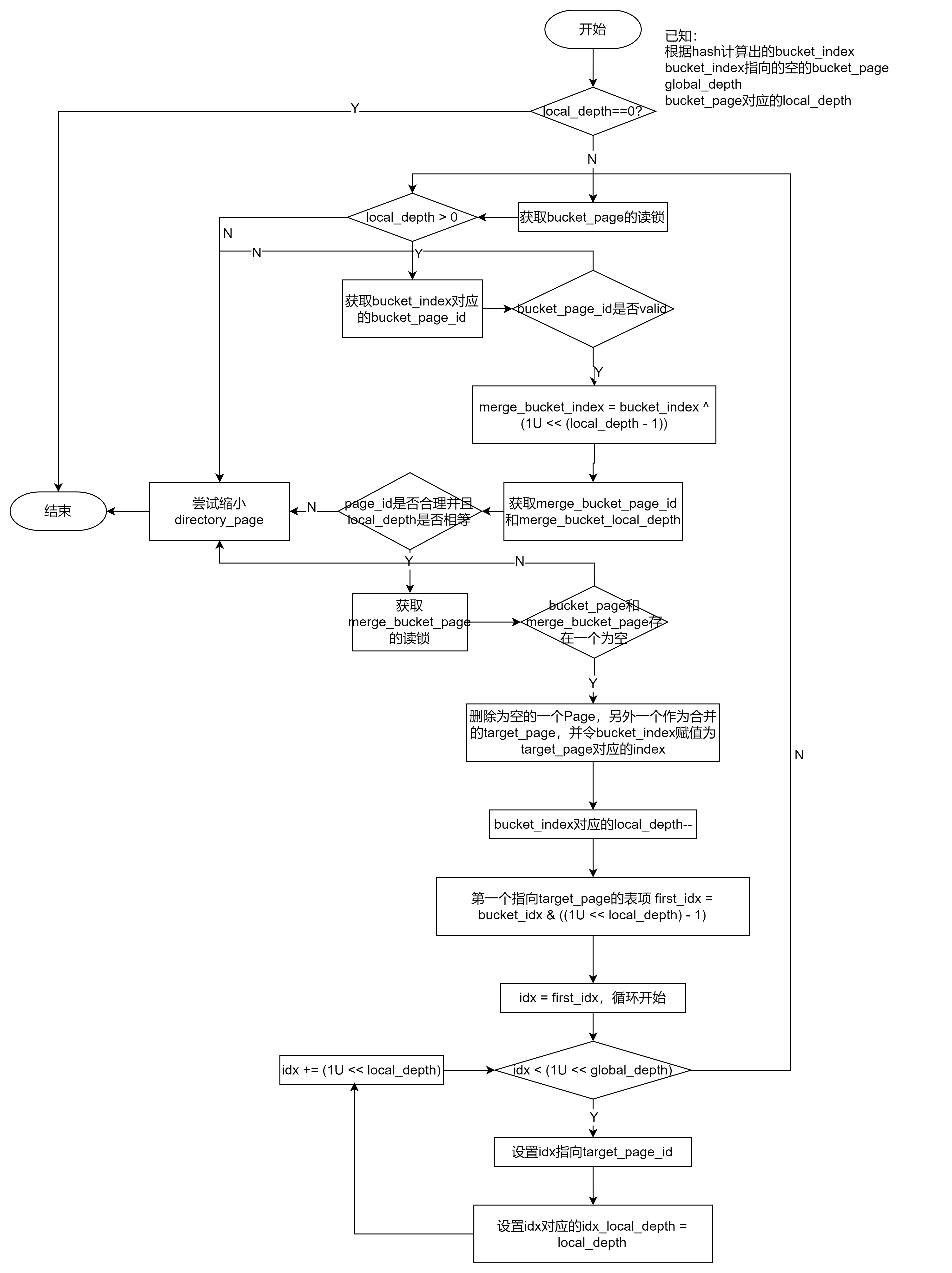
删除Remove
Remove操作首先按照类似查询的逻辑一步步定位到bucket_page,然后删除掉对应条目entry,如果出现未找到的情况,则直接返回false。
删除成功之后,如果当前bucket_page不为空,则直接返回true,否则要尝试合并bucket。合并详细流程如下(画得是真丑,轻喷)